سبد خرید شما خالی است.
گیربکس کاهنده چیست؟ (انواع و راهنمای انتخاب)
گیربکس دور کم کن و یا گیربکس کاهنده (Reduction Gearbox) سیستمی مکانیکی است که با استفاده از مجموعهای از چرخدندهها، سرعت دورانی ورودی را کاهش داده و همزمان گشتاور خروجی را افزایش میدهد. این نوع گیربکس صنعتی در بسیاری از صنایع برای کنترل سرعت و بهبود عملکرد سیستمهای مکانیکی مورد استفاده قرار میگیرد. گیربکس صنعتی کاهنده نقش مهمی در کاهش سرعت و تقویت نیروی چرخشی در سیستمهای مکانیکی دارند. انتخاب صحیح این گیربکسها بر اساس نیازهای صنعتی و مکانیکی، باعث بهبود بهرهوری و عملکرد دستگاهها خواهد شد.
ساختار و عملکرد گیربکس کاهنده
سادهترین شکل گیربکسهای دور کم کن متشکل از یک جفت چرخدنده میباشد. در این سیستم، نیروی ورودی از موتور یا منبع مکانیکی دیگر به چرخدنده محرک (ورودی) اعمال میشود. این چرخدنده با چرخش خود، چرخدنده دوم (خروجی) را به حرکت درمیآورد. در گیربکسهای دور کمکن، چرخدنده ورودی معمولاً کوچکتر از چرخدنده خروجی است یا تعداد دندانههای کمتری دارد. این اختلاف اندازه باعث کاهش سرعت خروجی و افزایش گشتاور میشود.
نسبت تبدیل گیربکسهای دور کم کن
میزان کاهش سرعت در یک گیربکس کاهنده بر اساس نسبت تبدیل (Gear Ratio) تعیین میشود. نسبت تبدیل از تقسیم تعداد دندانههای چرخدنده خروجی بر تعداد دندانههای چرخدنده ورودی به دست میآید. بهطور کلی: نسبت تبدیل = تعداد دندانههای چرخدنده خروجی ÷ تعداد دندانههای چرخدنده ورودی. این نسبت تعیینکننده میزان کاهش سرعت و افزایش گشتاور است. با تغییر تعداد مراحل کاهشی و طراحی خاص چرخدندهها، میتوان میزان کاهش سرعت و افزایش گشتاور را تنظیم کرد.
انواع گیربکسهای دور کم کن
بهطور کلی گیربکسهای دور کم کن را میتوان با توجه به نوع چرخدندهها، موقعیت محورها و شکل چیدمان چرخدندهها به انواع گوناگونی تقسیم کرد. هر کدام از این گیربکسها کاربردهای مختلفی دارند و عملکردی خاص و مطابق با نیاز کاربر ارائه میدهند.
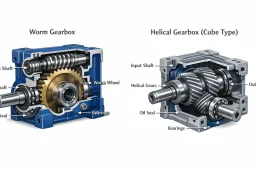
گیربکس کاهنده حلزونی
گیربکسهای حلزونی دارای یک شفت مارپیچ به نام ماردون هستند که به عنوان ورودی گیربکس عمل میکند. علاوه بر این، یک چرخدنده حلزونی در این سیستم وجود دارد که نقش خروجی را بر عهده دارد. محورهای ورودی و خروجی در گیربکس حلزونی با زاویه ۹۰ درجه نسبت به یکدیگر قرار دارند. به دلیل طراحی فشرده و کمحجم، گیربکسهای حلزونی در پروژههایی که فضای محدودی در دسترس است، مورد استفاده قرار میگیرند.
گیربکس کاهنده خورشیدی
گیربکسهای خورشیدی متشکل از چهار جز اصلی چرخدنده خورشیدی، چرخدنده سیارهای، چرخدنده رینگی و حامل هستند. نیروی ورودی، چرخدنده خورشیدی را که در مرکز مجموعه قرار دارد، به چرخش درمیآورد. این حرکت باعث دوران چرخدندههای سیارهای میشود که به بازوی حامل متصلاند و درون چرخدنده رینگی میچرخند. چرخش چرخدندههای سیارهای در نهایت موجب حرکت حامل و شفت خروجی متصل به آن میشود.
گیربکس کاهنده هلیکال
گیربکسهای هلیکال از چرخدندههای مارپیچی تشکیل شدهاند که دندانههای آنها با زاویهای نسبت به محور چرخش قرار میگیرند. این طراحی درگیری تدریجی دندانهها، کاهش صدا و افزایش بازده انتقال نیرو را به همراه دارد. در این نوع گیربکس، نیروی ورودی به چرخدنده محرک منتقل میشود و با حرکت نرمتر و یکنواختتر نسبت به گیربکسهای ساده، چرخدنده خروجی را به چرخش درمیآورد. این ویژگی موجب افزایش عمر قطعات و کاهش لرزش میشود.
گیربکس کاهنده مخروطی
گیربکسهای مخروطی از چرخدندههای مخروطی تشکیل میشوند که نسبت به محور ورودی و خروجی در زاویهای خاص قرار دارند. این طراحی اجازه میدهد تا دو محور ورودی و خروجی در زاویه ۹۰ درجه نسبت به یکدیگر قرار بگیرند، مشابه گیربکسهای حلزونی، اما با تفاوت در ساختار چرخدندهها. در گیربکسهای مخروطی، چرخدندههای مخروطی بهطور معمول بهصورت جفتهای همراستا قرار میگیرند و نیروی ورودی از طریق چرخدندههای مخروطی به چرخدنده خروجی منتقل میشود.
گیربکس کاهنده چند محور
گیربکسهای کاهنده چند محور بهگونهای طراحی شدهاند که امکان انتقال قدرت و کاهش سرعت از طریق چندین محور را فراهم میکنند. در این نوع گیربکسها، چرخدندهها و شفتهای ورودی و خروجی بهصورت موازی و در کنار یکدیگر قرار میگیرند تا نیروی ورودی را به چندین محور مختلف انتقال دهند. این گیربکسها معمولاً در سیستمهایی که نیاز به چندین خروجی با سرعتهای مختلف دارند، استفاده میشوند. ساختار این گیربکسها ممکن است شامل مجموعهای از چرخدندههای دندانهدار و چرخدندههای مخروطی باشد که قادر به کاهش سرعت و افزایش گشتاور در محورهای مختلف هستند. این طراحی بهویژه در مواردی که تعداد زیادی محور و شفت بهطور همزمان باید قدرت و نیروی مختلف را دریافت کنند، کارآمد است.
گیربکس کاهنده سیکلوئیدی
گیربکسهای سیکلوئیدی یکی از انواع گیربکسهای پیچیده و با عملکرد بالا هستند که در آنها از چرخدندههای سیکلوئیدی بهجای چرخدندههای دندانهدار معمولی استفاده میشود. در این سیستمها، حرکت دورانی ورودی بهواسطه چرخدندههای سیکلوئیدی که بهطور منحنی شکل هستند، به خروجی انتقال مییابد. این طراحی منحصر به فرد باعث میشود که گیربکسهای سیکلوئیدی نسبت به گیربکسهای معمولی در انتقال قدرت و کاهش سرعت، عملکرد بهینهتری داشته باشند.
نکات مهم انتخاب گیربکس دور کم کن
هدف اصلی استفاده از گیربکس کاهنده، تنظیم سرعت و گشتاور ورودی برای تطبیق با نیازهای عملیاتی سیستمهای مکانیکی است. برای انتخاب یک گیربکس مناسب، باید پارامترهای مختلفی را بررسی کرد تا عملکرد بهینهای برای کاربرد موردنظر حاصل شود.
بیشتر بخوانید: راهنمای انتخاب گیربکس صنعتی
یکی از مهمترین نکات، شناخت دقیق گشتاور و نسبت تبدیل گیربکس است. این دو عامل مستقیماً بر کارایی و توانایی انتقال نیرو تأثیر میگذارند. اما علاوه بر این، هنگام انتخاب و خرید گیربکس دور کم کن، باید عوامل زیر را نیز در نظر گرفت:
- گشتاور ورودی موتور (میزان نیروی اعمالی از طرف موتور)
- سرعت موتور (تعداد دور در دقیقه که موتور تولید میکند)
- نسبت تبدیل گیربکس (میزان کاهش سرعت و افزایش گشتاور)
- گشتاور خروجی گیربکس (نیروی انتقالی به سیستم خروجی)
- نوع گیربکس کاهنده (مانند حلزونی، خورشیدی، مخروطی و غیره)
- ابعاد و وزن گیربکس (محدودیتهای فیزیکی در محل نصب)
- راندمان گیربکس (میزان بهرهوری و اتلاف انرژی در فرآیند انتقال قدرت)
- سایر ملاحظات فنی و محیطی (مانند میزان نویز، نیاز به روانکاری و شرایط عملیاتی)